Adapt or perish: A review of planning approaches for adaptation under deep uncertainty

Abstract
There is increasing interest in long-term plans that can adapt to changing situations under conditions of deep uncertainty. We argue that a sustainable plan should not only achieve economic, environmental, and social objectives, but should be robust and able to be adapted over time to (unforeseen) future conditions. Large numbers of papers dealing with robustness and adaptive plans have begun to appear, but the literature is fragmented. The papers appear in disparate journals, and deal with a wide variety of policy domains. This paper (1) describes and compares a family of related conceptual approaches to designing a sustainable plan, and (2) describes several computational tools supporting these approaches. The conceptual approaches all have their roots in an approach to long-term planning called Assumption-Based Planning. Guiding principles for the design of a sustainable adaptive plan are: explore a wide variety of relevant uncertainties, connect short-term targets to long-term goals over time, commit to short-term actions while keeping options open, and continuously monitor the world and take actions if necessary. A key computational tool across the conceptual approaches is a fast, simple (policy analysis) model that is used to make large numbers of runs, in order to explore the full range of uncertainties and to identify situations in which the plan would fail.
This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/)
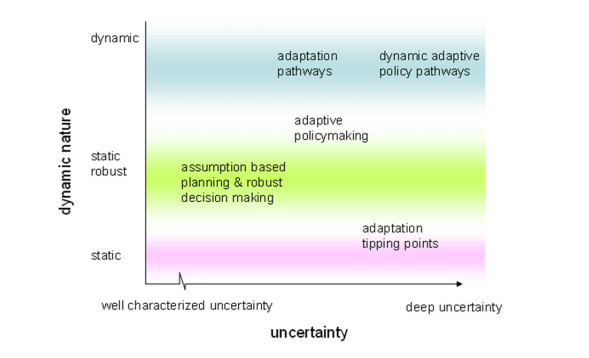
A map of the approaches for developing adaptive policies according to their dynamics and level of uncertainty
Suggested citation:
Walker, W.E., Haasnoot, M., Kwakkel, J.H. 2013. Adapt or Perish: A Review of Planning Approaches for Adaptation under Deep Uncertainty. Sustainability 2013, 5, 955-979, doi: 10.3390/su5030955
(0) Comments
There is no content